This article is quoted from the “China Elevator” magazine.
Escalators are fixed electrically-powered devices with continuously moving steps used for transporting passengers up or down inclined pathways, widely used in shopping malls, supermarkets, airports, and subways, facilitating people’s travel. Of course, the electricity consumed by escalators during operation is also significant, so it is of great importance to scientifically apply energy-saving drive technologies based on the analysis of the actual operating conditions of escalators. There are three common energy-saving drive methods for escalators: star-triangle drive, full variable frequency drive, and bypass variable frequency drive, which will be analyzed in detail below.
1. Star-Triangle Drive
The main circuit wiring diagram for the automatic escalator star-triangle drive is as shown in Figure 1. When the motor switches to star connection, the three-phase stator winding voltage of the motor is 1/√3 of the delta connection voltage value, and the three-phase stator winding current is 1/3 of the delta connection current value, which can reduce the output power of the motor; when the motor switches to delta connection, the automatic escalator is in normal operation mode. The switching between star connection and delta connection is realized based on the sensor detection of whether the automatic escalator is under light load (including no load) or heavy load: star connection for light load and delta connection for heavy load. There are two detection methods: one is to use sensors set at the entrance and exit of the automatic escalator to detect the number of passengers, and determine whether the escalator is under light load or heavy load based on the set threshold; another method is to use a speed sensor to detect the running speed of the automatic escalator, and if the running speed is significantly lower than the threshold, it indicates that the escalator is under heavy load. The operation process of the automatic escalator during star-triangle drive is as shown in Figure 2.
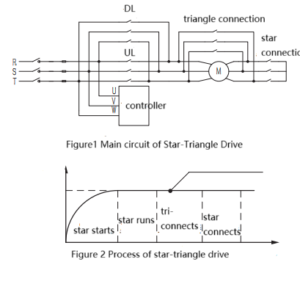 The analysis shows that the star-triangle drive method is: 1) The voltage reduction startup method is adopted when the escalator starts, the motor speed is 1/3 of the speed when connected in a delta, which not only reduces the impact on the power grid and motor during the startup process but also has an energy-saving effect; 2) During the transition from star connection to delta connection, the actual running speed of the escalator does not change, so this startup method is suitable for occasions with light load startup. This startup method has a simple structure and low cost. It should be noted that for escalators with automatic start-stop functions, frequent startups and braking may affect the service life of mechanical components such as the escalator brake.
The analysis shows that the star-triangle drive method is: 1) The voltage reduction startup method is adopted when the escalator starts, the motor speed is 1/3 of the speed when connected in a delta, which not only reduces the impact on the power grid and motor during the startup process but also has an energy-saving effect; 2) During the transition from star connection to delta connection, the actual running speed of the escalator does not change, so this startup method is suitable for occasions with light load startup. This startup method has a simple structure and low cost. It should be noted that for escalators with automatic start-stop functions, frequent startups and braking may affect the service life of mechanical components such as the escalator brake.
2. Full Variable Frequency Drive
Full variable frequency drive refers to the acceleration, constant speed, and deceleration processes of the escalator all being controlled by the variable frequency drive. The basic principle of variable frequency speed control is to maintain a constant air gap flux. According to the principle of electromagnetic induction, the air gap flux induces an electromotive force in the three-phase stator winding.
![]()
In which: f – power supply operating frequency, Hz; N – number of turns in each phase winding of the three-phase stator in series; k – fundamental winding coefficient; Φ – air gap flux per pole, Wb.
The relationship between the speed n of the motor and the operating frequency f of the power supply is:
![]()
In which: p — pole pair number; s — slip rate
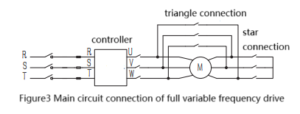
By combining equations (1) and (2), it can be determined that the speed of the motor varies with the working frequency of the power supply. By changing the power supply frequency and voltage simultaneously, and ensuring that the air gap flux remains constant, the speed of the motor can be adjusted to achieve stepless speed regulation. The main circuit wiring for full variable frequency drive is shown in Figure 3.
Compared with star-delta drive, the fully variable frequency drive has the following three advantages:
a. For the fully variable frequency drive, since the output current of the motor changes in real-time with the load of the escalator, the inverter can adjust the output voltage in real-time according to the detected current changes. The adjustment principle is to change the proportion of the conduction time (i.e., duty cycle) of the power tubes in the inverter within one cycle. The longer the conduction time of the power tube within a switching frequency, the higher the effective value of the output voltage, and vice versa. This can achieve the purpose of energy saving under light load conditions of the escalator without changing the running speed.
b. The fully variable frequency drive can realize the operation of the escalator in different time periods, improving the operation efficiency. The drive system can set two or more running speeds according to the actual operating conditions of the escalator and the characteristics of passenger flow. The escalator operates at rated speed during peak hours to improve work efficiency; while operating at a lower speed during off-peak hours to increase the energy-saving effect of the escalator.
c. When the escalator is in the heavy load downward condition, the motor is in the power generation state, and by configuring an energy feedback unit, the electrical energy generated during this condition can be fed back to the grid through inversion, achieving further energy saving. Moreover, the fully variable frequency drive has higher accuracy in controlling the speed of the escalator compared to the star-delta drive, making the escalator run more smoothly and thereby improving passenger comfort.
From the above analysis, it can be seen that the fully variable frequency drive can set different running speeds according to the load changes and is more suitable for occasions with large changes in passenger flow (such as airports, subway stations, high-speed railway stations, etc.), with good economic practicality.
Of course, the fully variable frequency drive also has its inherent disadvantages: 1) The power of the inverter selected should be greater than the rated power of the motor, which increases the total cost of the drive system; 2) When the escalator is in the heavy load downward condition, the motor is in the power generation state, causing the voltage of the capacitor at the output end of the inverter to suddenly increase. If the drive system is not equipped with an energy feedback unit, a braking resistor needs to be configured to dissipate this energy in the form of heat.
3. Bypass Variable Frequency Drive
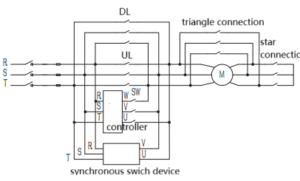
Bypass frequency conversion drive combines the advantages of both frequency conversion drive and industrial frequency drive, its working principle is to apply frequency conversion drive in the speed change process of escalator operation. The motor speed regulation at the start of the escalator adopts frequency conversion control, and the motor is switched to industrial frequency drive when the escalator is ready to enter the rated speed operation, and then the drive system automatically places the frequency converter in bypass standby state. During the entire operation process of the escalator, the frequency converter only works for a short time, so the rated power of the frequency converter can be reduced to save costs during the selection. Escalators using bypass frequency conversion drive usually also come with a set of traditional star-delta drive system as backup. Two sets of drive systems for one escalator can greatly reduce the probability of escalator failures. The main circuit wiring diagram of bypass frequency conversion drive with star-delta drive system is shown in Figure 4.
 Bypass frequency conversion drive avoids the frequent starting and stopping of the escalator. Since the escalator consumes a lot of electrical energy when accelerating from zero speed to rated speed, the drive system uses a frequency converter to increase the speed of the escalator to the rated speed, and then the frequency converter is bypassed and the drive system switches to the power frequency drive [4]. This cycle is repeated to achieve energy saving. The bypass frequency conversion drive has the following three advantages.
Bypass frequency conversion drive avoids the frequent starting and stopping of the escalator. Since the escalator consumes a lot of electrical energy when accelerating from zero speed to rated speed, the drive system uses a frequency converter to increase the speed of the escalator to the rated speed, and then the frequency converter is bypassed and the drive system switches to the power frequency drive [4]. This cycle is repeated to achieve energy saving. The bypass frequency conversion drive has the following three advantages.
a. It combines the advantages of frequency conversion drive. That is, during the starting process of the escalator, the motor can achieve smooth and stable speed regulation, and the impact on the motor during the starting process is small; when there is less passenger flow, it can run in standby mode, reducing mechanical wear and tear while achieving energy saving.
b. The advantage of direct grid driving for escalator operation is that when the motor is running at a stable speed, the electrical energy generated by the motor entering the power generation state during the braking of the escalator can be directly fed back to the grid. This achieves energy feedback in the simplest and easiest way, saving the use of braking resistors compared to full frequency conversion drive.
c. Since the frequency converter only functions during the starting, stopping, and low-speed climbing of the escalator, the rated power of the frequency converter can be less than the rated power of the motor. Generally speaking, the power of the frequency converter only needs to reach 60% of the motor’s power, which saves the cost of the drive system.
Of course, the bypass frequency conversion drive also has its own disadvantages: 1) Since the drive system has to switch frequently between frequency conversion drive and power frequency drive, the switching on and off is generally completed by contactors. This not only tests the switching capacity and frequency of the contactors but also requires a relatively perfect control circuit design. Therefore, the design of the drive system software and hardware is relatively complex, and it also brings certain difficulties to the subsequent maintenance work of the maintenance personnel. 2) The bypass frequency conversion drive is not flexible enough in the choice of energy-saving methods. The fixed rated speed prevents it from realizing the functions of time-sharing and segmented operation, and it cannot change the output voltage according to the actual load of the escalator. Compared with full frequency conversion drive, it cannot achieve the purpose of frequency conversion energy saving under light load conditions. Therefore, the bypass frequency conversion drive is more suitable for occasions with less passenger flow and intermittent no-load operation, such as pedestrian overpass escalators.
4. Conclusion
In this article, the author analyzes the principles, advantages and disadvantages, and application scenarios of three energy-saving driving methods for escalators: star-delta drive, full variable frequency drive, and bypass variable frequency drive. How to further reduce the impact generated during the switching process between variable frequency drive and power frequency drive of escalators, and how to achieve a smoother transition between the two to ensure passenger comfort, requires joint in-depth research by elevator manufacturing units and inspection agencies.